Newsroom
What are the precision grades of ultra-thin section ball bearings?
2026-06-03  There are two mainstream tolerance standards globally for slim thin-section ball bearings: ISO Precision Class (P Code) & ABEC Rating (North American Standard for Kaydon inch thin bearings)
There are two mainstream tolerance standards globally for slim thin-section ball bearings: ISO Precision Class (P Code) & ABEC Rating (North American Standard for Kaydon inch thin bearings)
1. Standard Equivalence Table (ISO ↔ ABEC / Kaydon Class) 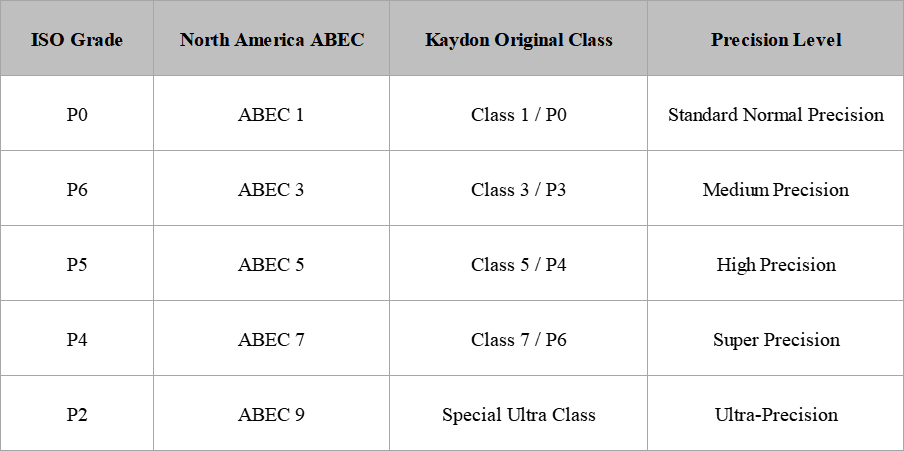
2. Grade Definition & Application Scenarios
P0 (ABEC1 / Kaydon Class1)
- Basic commercial grade, loose dimensional tolerance, cost-effective
- Usage: Low-speed turntable, light-duty rotary fixture, general automation, standard Type C radial bearings
P6 (ABEC3 / Kaydon Class3)
- Intermediate precision, low vibration, moderate runout
- Usage: General PTZ camera gimbal, ordinary rotary platform, low-load automation spindle
P5 (ABEC5 / Kaydon Class5, Industry mainstream precision)
- High rotational accuracy, controlled radial & axial runout
- Usage: Industrial robot joints, medical imaging equipment, optical instrument turntable, paired Type A angular contact bearings, standard Type X four-point contact bearings
P4 (ABEC7 / Kaydon Class7)
- Super-precision, minimal runout, pre-matched duplex available
- Usage: Aerospace components, radar rotary unit, high-end semiconductor equipment, precision harmonic drive output end
P2 (ABEC9, Top ultra-precision)
- Strictest tolerance, custom manufacturing only, high cost
- Usage: Military optical system, lab ultra-precision indexing device, precision gyro assembly

3. Precision Recommendation by Bearing Structure (Type A / C / X)
Type C (Thin Section Deep Groove Bearing)
- General cost project: P0 / ABEC1
- Precision automation: P6 / ABEC3
- Rarely select P5/P4 unless high-accuracy requirement
Type A (Thin Section Angular Contact Thin Bearing, must be installed in duplex pairs DB/DF)
- Minimum selection: P5 / ABEC5 for paired preload positioning
- High-end positioning spindle: P4 / ABEC7 matched set
Type X (Four-Point Contact Bearing, single bearing bears radial + bidirectional axial + tilting moment)
- Ordinary surveillance gimbal: P6 / ABEC3
- Standard industrial robot joint: P5 / ABEC5 (most popular)
- Medical/aviation high-end rotary: P4 / ABEC7

4. Marking Example of Real-Slim Model
KD050CP0 → Type C, bore 50 inch-series, P0(ABEC1)
KG090XP5 → Type X, bore90, P5(ABEC5) high precision
KA075AP4 → Type A angular contact, P4(ABEC7) super precision
